Background and Goal
The objective of this lab is to gain experience with the
processing of hyperspectral remotely sensed data. Because hyperspectral images
have many bands with specific wavelengths, it is common for several of the
bands to be corrupt or incorrect from atmospheric influences as well as sensor
error. It is necessary to detect these noisy bands and remove them from the
processing. We then learned how to detect target features from the
hyperspectral image.
Methods
For this lab we used Airborne Visible/Infrared Imaging
Spectrometer (AVIRIS) data of a geologic field site in Nevada. The image
consisted of 255 bands. Anomaly detection was used to compare results between
an image that was not preprocessed and an image that had bad bands removed. Anomaly
detection identifies pixels in the image that have a significant deviation of
spectral signature compared to the rest of the image. First, we did an anomaly
detection of the AVIRIS image without removing the bands. Then, we used the Bad
Band Selection Tool to identify the bad bands within the image. Figure 1 shows
this tool, with the bad bands highlighted. A total of 20 bands were removed.
The two outputs of the anomaly detection function were then compared for
differences.
 |
| Figure 1: The bad band selection tool, with the bad bands highlighted in red. |
Next, we explored the use of target detection. This process
creates a mask that highlights instances of a given spectral frequency (the
target). For this lab, the target was the mineral Buddingtonite. First, we used
a simple target detection method that used a spectral signature that was
collected from a classified image. This would create a mask in much the same
way the anomaly detection did, highlighting areas with the same spectral
signature. Next, we used a spectral signature from the USGS spectral signature
library and analyzed the two outputs for differences.
Results
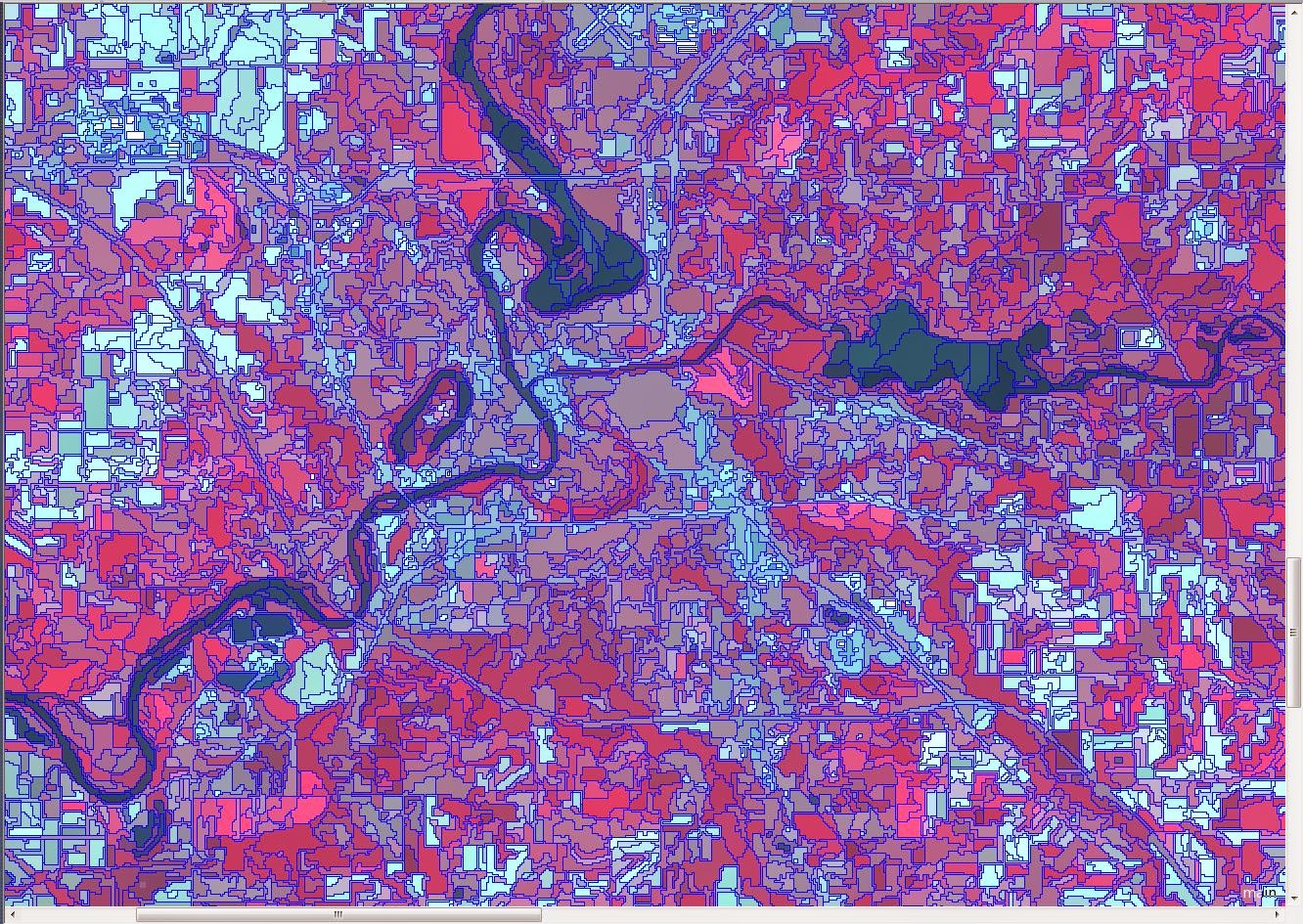
Figures 2 and 3 show the anomaly masks for the image without
bands removed and the image with bad bands removed, respectively. There isn’t
too much of a difference just by looking at them, but by using the swipe tool
in the spectral analysis workstation, a difference was determined. After
removing the bands, the anomalies were highlighted in the same area, however
they were a little larger.
 |
| Figure 2: The anomaly mask of the image without the bad bands removed. |
 |
| Figure 3: The anomaly mask of the image with the bad bands removed. The anomalies are in the same spot, though they are slightly larger. |
Figure 4 shows the results of the target detection overlay.
There was an error with the simple target detection which just created a grey
box for the target mask. The target detection with the USGS Spectral library
signature worked just fine though. I’m guessing that the results of the simple
target detection would show more spread and peppering, as the spectral
signature was based off of a classification image.
 |
| Figure 4: The results of the overlay comparing the simple target detection and the spectral library target detection. There was an error with the spectral signature in the simple target detection, leaving only a grey box. |
Sources
Erdas Imagine.
(2010). [AVIRIS hyperspectral image]. Hexagon
Geospatial. Obtained from Erdas Imagine 2010.